




CUAV C-Compass Model
- Low noise, low temperature drift, high resolution car grade RM3100 electronic compass
- Advanced magnetic filtering algorithm can effectively eliminate magnetic interference and accurately measure the heading of the device
Features:
- Low noise, low temperature drift, high resolution car grade RM3100 electronic compass
- Advanced magnetic filtering algorithm can effectively eliminate magnetic interference and accurately measure the heading of the device
- Self-developed M4C software architecture, rapid customization and development
- DroneCan bus protocol, supports open source platforms such as PX4/ArduPilot
- Low noise, low temperature drift, high resolution car grade RM3100 electronic compass
- Advanced magnetic filtering algorithm can effectively eliminate magnetic interference and accurately measure the heading of the device
- Self-developed M4C software architecture, rapid customization and development
- DroneCan bus protocol, supports open source platforms such as PX4/ArduPilot
C-Compass
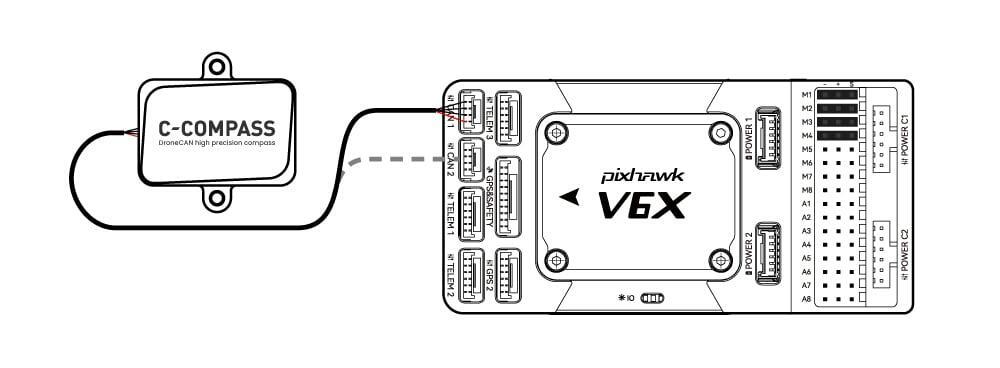
C-Compass is a high-performance industrial anti-interference magnetometer; it integrates a vehicle-grade RM3100 electronic compass and supports the DroneCAN protocol, widely used in unmanned systems such as PX4 or ArduoPilot as an external compass to eliminate magnetic field interference from internal components (cables, batteries, motors e.g.).
C-Compass is a high-performance industrial anti-interference magnetometer; it integrates a vehicle-grade RM3100 electronic compass and supports the DroneCAN protocol, widely used in unmanned systems such as PX4 or ArduoPilot as an external compass to eliminate magnetic field interference from internal components (cables, batteries, motors e.g.).
Data sheet
C-Compass
MCU
STM32F412
Sensor
RM3100
Software Architecture
CUAV M4C
Protocol
DroneCan/UAVCAN
Communication rate
2Mb
Refresh rate
80Hz
Noise
15nT
Accuracy
0.25° (effective value)
Repetition accuracy
0.05°
Resolution
0.01°
Sensitivity
13nT
Range
-800 μT to +800 μT
Controller type
PX4/ArduPilot(CUAV/Pixhawk e.g.)
Interface
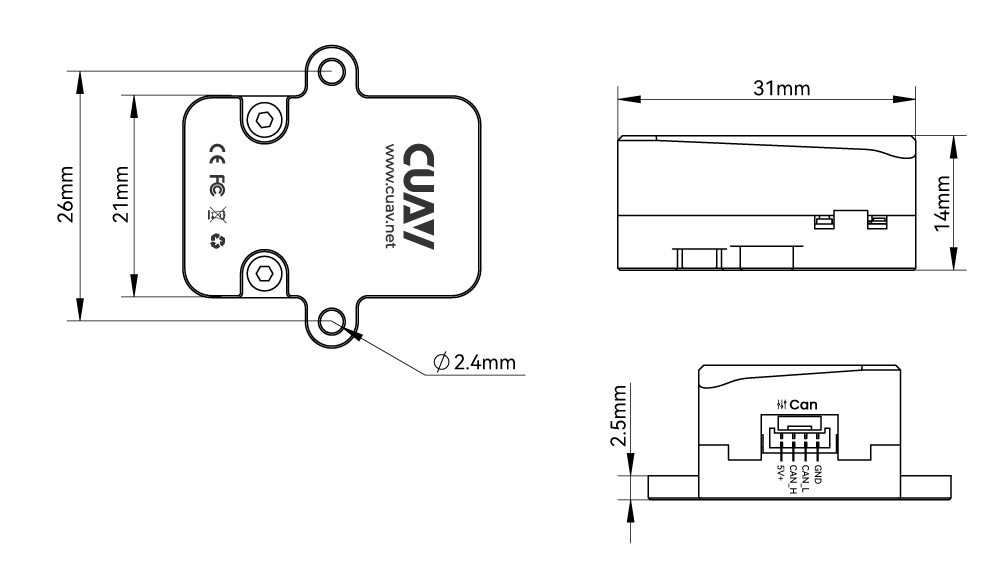
GHR-04V-S
Operating Voltage
4.75-5.3V
Operating temperature
-20 to 80℃
Operating humidity
5%~95% (non-condensing)
Casing material
Aluminum alloy
Weight
13g
C-Compass | |
MCU | STM32F412 |
Sensor | RM3100 |
Software Architecture | CUAV M4C |
Protocol | DroneCan/UAVCAN |
Communication rate | 2Mb |
Refresh rate | 80Hz |
Noise | 15nT |
Accuracy | 0.25° (effective value) |
Repetition accuracy | 0.05° |
Resolution | 0.01° |
Sensitivity | 13nT |
Range | -800 μT to +800 μT |
Controller type | PX4/ArduPilot(CUAV/Pixhawk e.g.) |
Interface | GHR-04V-S |
Operating Voltage | 4.75-5.3V |
Operating temperature | -20 to 80℃ |
Operating humidity | 5%~95% (non-condensing) |
Casing material | Aluminum alloy |
Weight | 13g |


